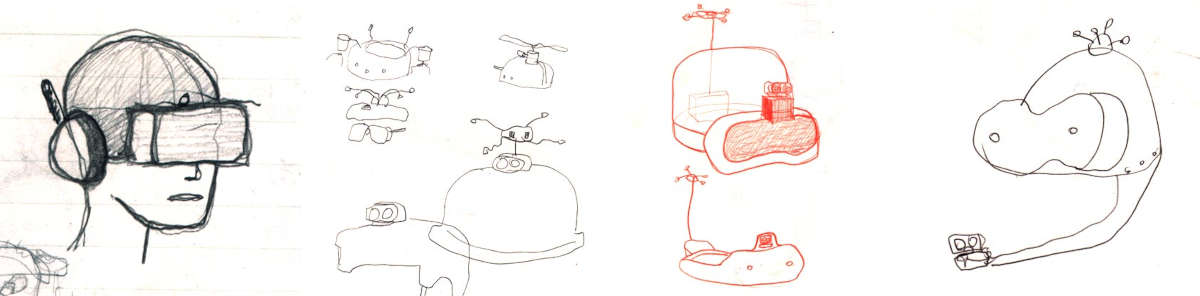
Sensor-fitted goggles and ear sets allow users to experience what it is like to perceive the universe as a robot would.


Québec 2006
The original Robotic Perception Kit was developed during Activités positives, a residency in Le Lieu, Québec City, Canada, in March 2006. It comprises two sets of goggles and helmets, plus a small robot.
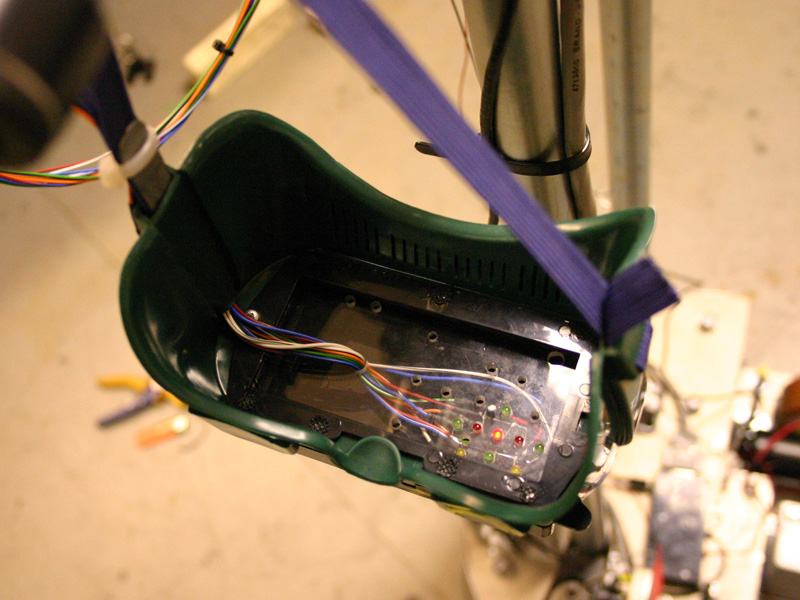
The helmets are fitted with one ultra-sound sensor and an infra-red beacon, which are connected to LEDs (light-emitting diodes) in the goggles. The goggles are otherwise blind.
The ultra-sound sensor provides information about the presence of obstacles ahead, while the infra-red beacon indicates if another robotic perception unit is present in the close environment.
When the sensors detect, the corresponding diode lights up, and the participant can take the appropriate action, emulating the program of a robot.
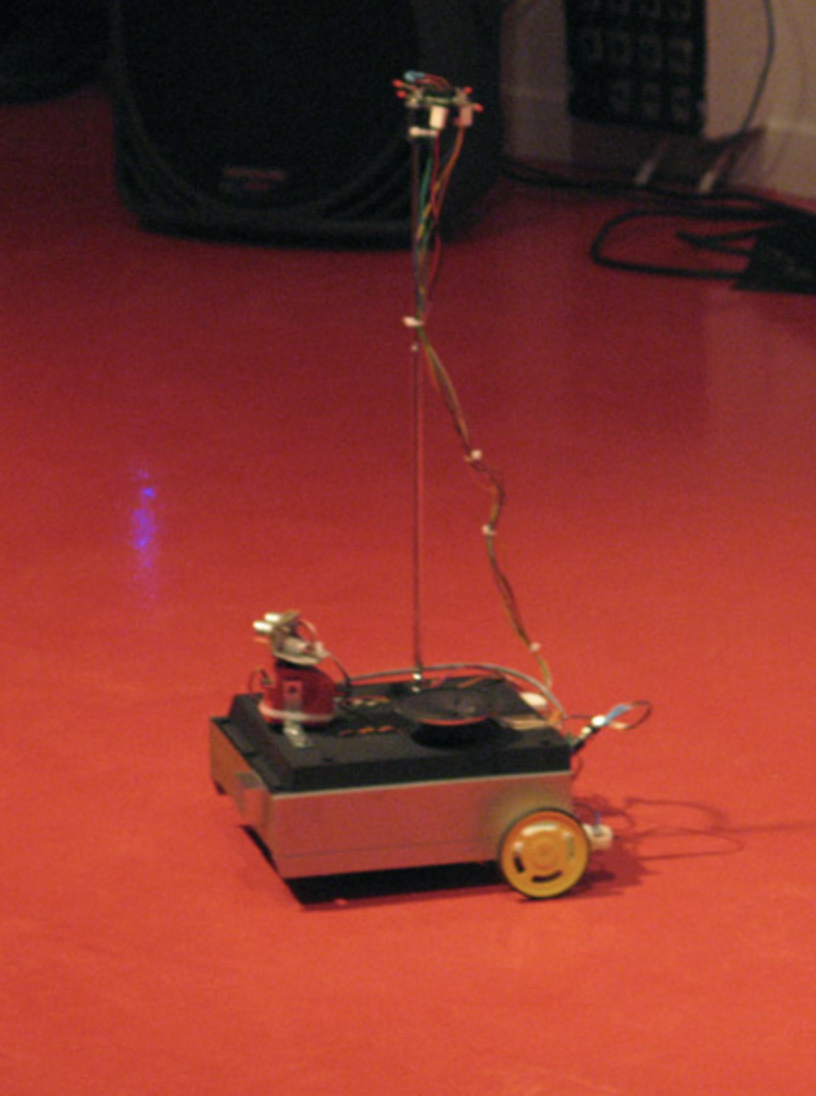
The small autonomous mobile robot, fitted with the same sensors as the helmets, can also operate in the space and be detected by the participants.


Frankfurt 2007

Eindhoven 2012

Zürich 2006